Апдейт виртуального мультикоптера
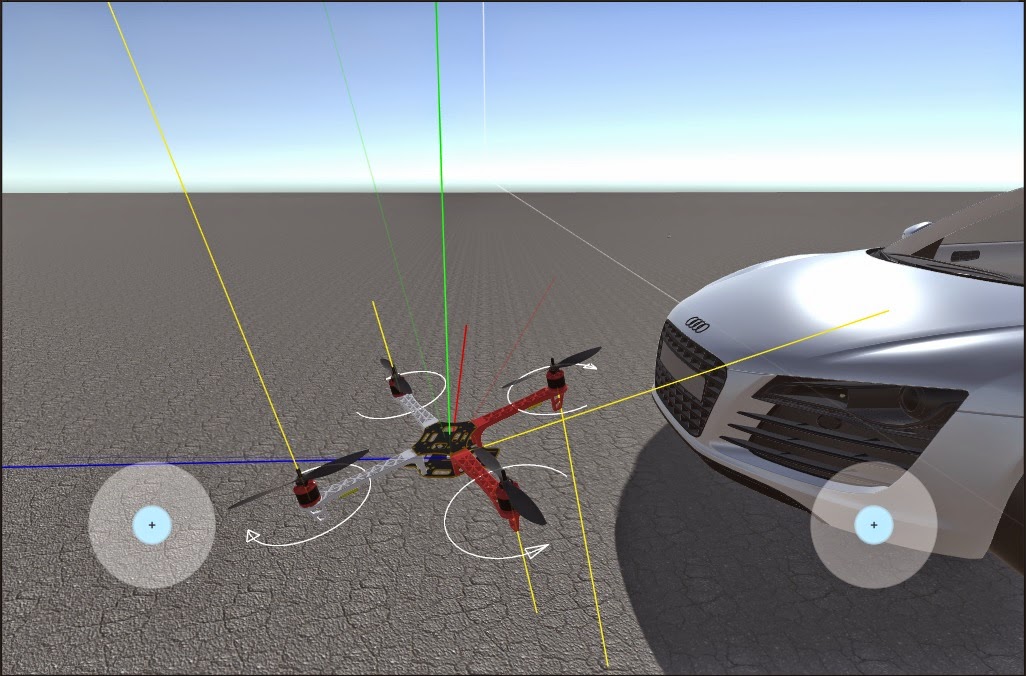
Перепиливаю систему стабилизации мультикоптера. Переписал код работающий с ориентацией коптера с углов Эйлера на кватернионы, всё стало клёвее, ошибка считается в локальном пространстве коптера, представляет собой вектор “наклона” коптера относительно заданной ориентации. Dot-ом для каждого считаю развешивание ошибки между движками (на рисунке – жёлтые линии выходящие из движков), получается прям очень удобная система! Она не зависит от количества и расположения движков, всё автоматом развешивается и работает. Осталось накинуть обратно PID контроллеры и квадрик снова будет летать )
Квадрокоптер
Пришёл наконец с Китая Hubsan X4 H107L квадрокоптер. Самый простой в серии X4, но летает весьма круто. Правда, из коробки он по ходу вообще не был откалиброван, летел в сторону, стики странные значения по разным осям выдавали, но после стандартных калибровок стиков/акселерометра всё пришло в норму )

Развлечение
Решил забавы ради запилить простенький симулятор мультикоптеров на Unity.
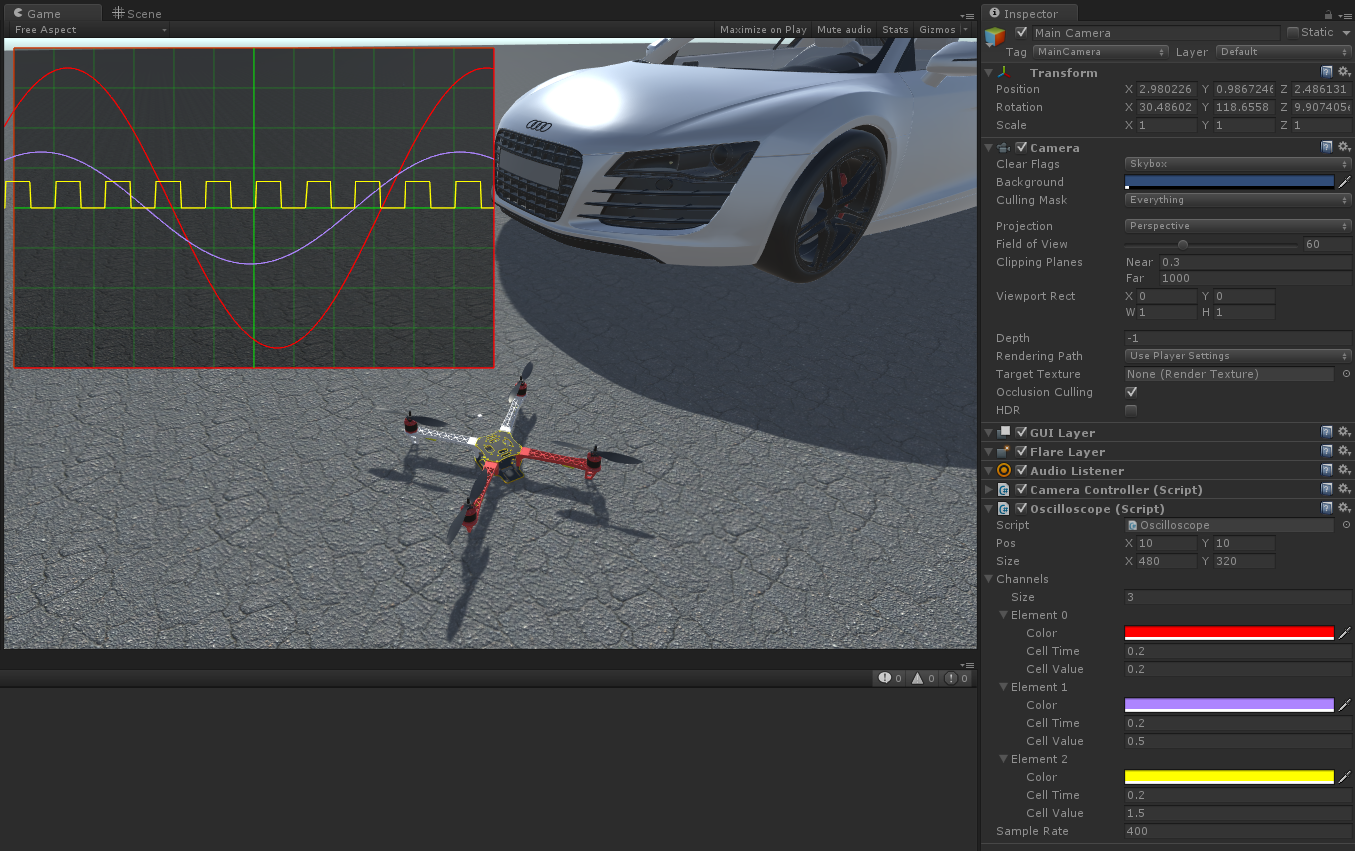
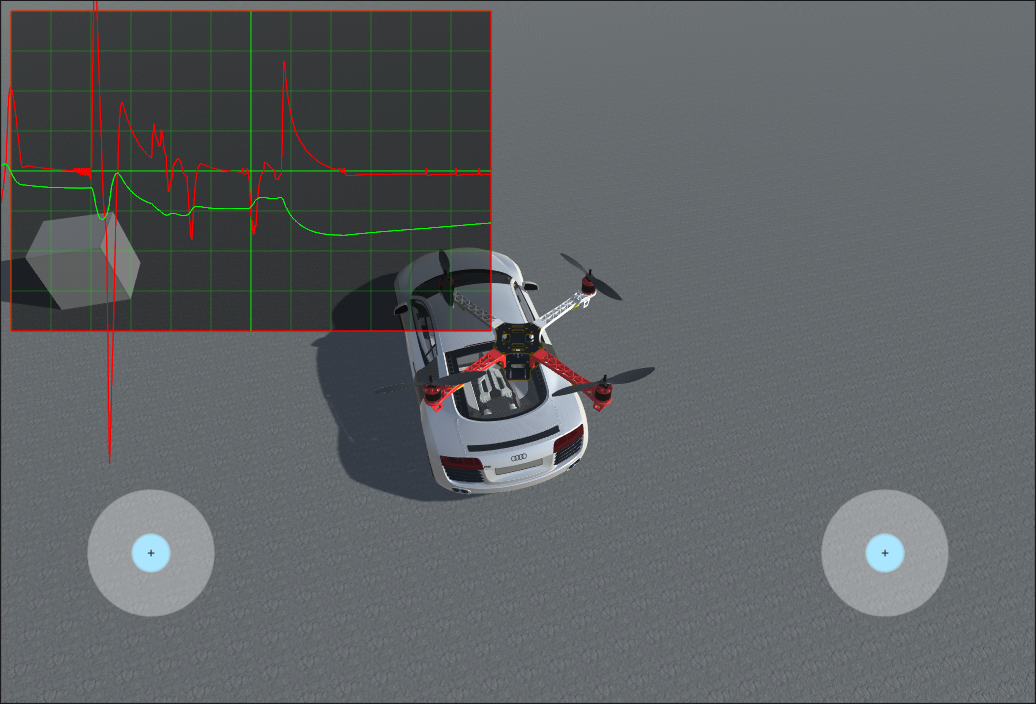
Сделал расчёт тяги винтов, расчёт крутящего момента, минимальную стабилизацию в контроллере полёта ) Летает, корявенько пока, но я прекрасно понимаю что надо сделать, чтобы летал нормально, тем и занимаюсь в данное время ) Для отладки контроллеров стабилизации накидал себе сейчас скриптик “Осциллограф”. Поддерживает любое количество “каналов”, у каналов настраивается скейл по обоим осям, настраивается частота семплинга у осциллографа. В общем довольно удобная для дебага штуковина получилась )