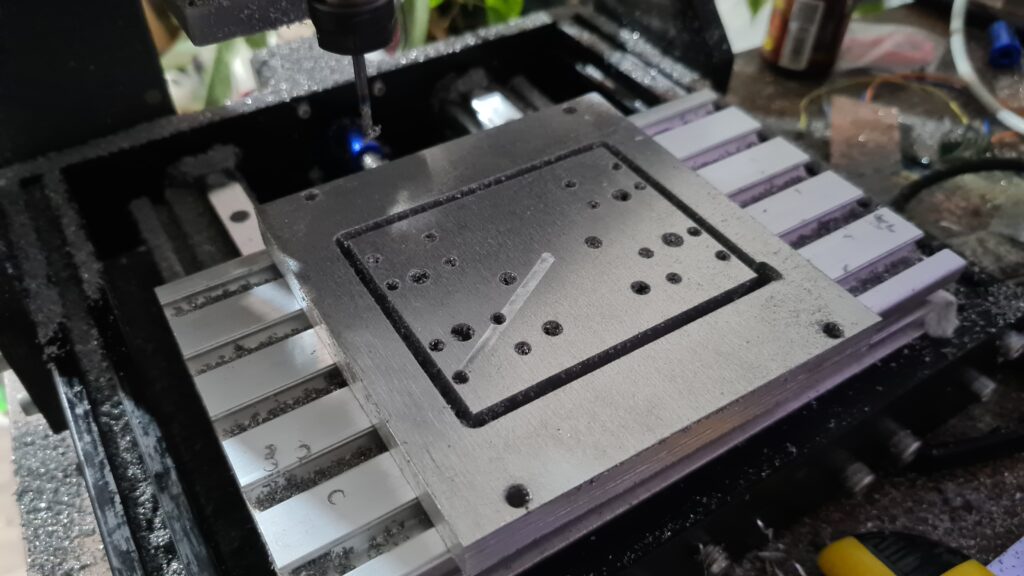
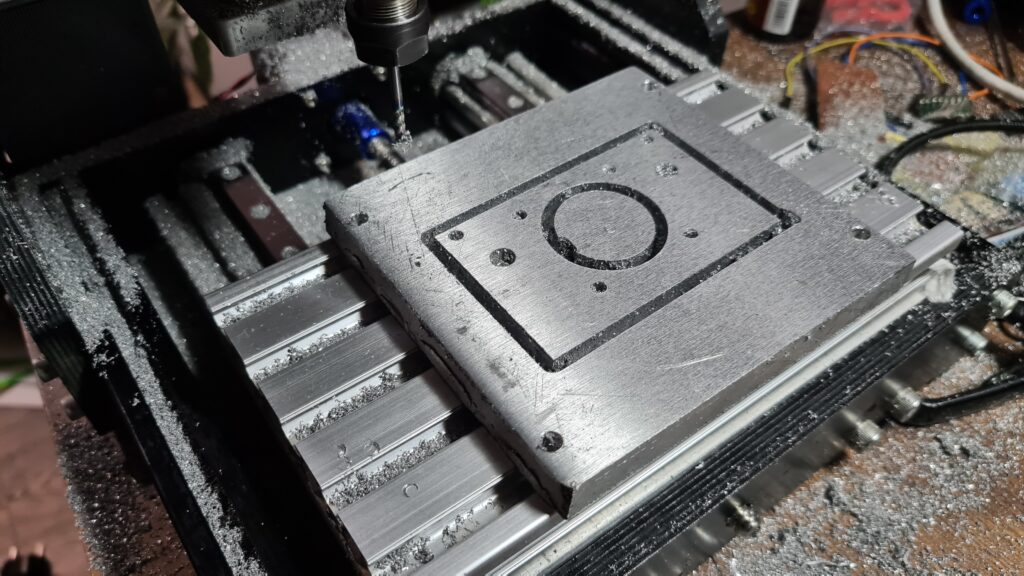
Разобрался с CAD/CAM софтом и отфрезеровал первые в моей жизни алюминиевые детали по моему проекту )
Оказалось это всё очень просто, что проектировать, что обработку описывать в CAМ софте. Получилось с первого раза )
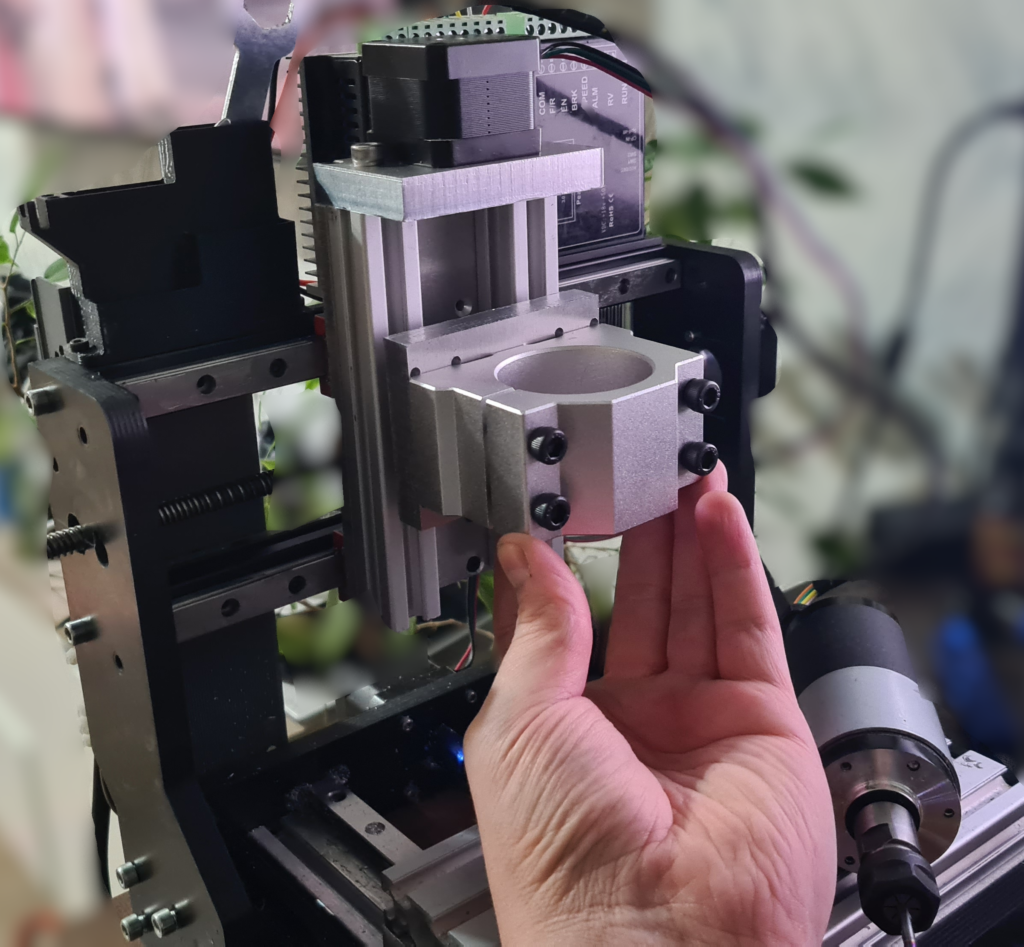
Вот так пока получается. Переделал Y ось на рельсы и почти собрал Z ось, но пока не хватает рельсов и подшипников. По поводу жёсткости – часовой индикатор ни какого люфта не детектит при значительном нажиме на ось, здорово в общем )
Как доделаю Z ось нужно будет сразу добавить в сетап мой самодельный микро пылесос, а то стружки вагонище. Ну и коробку-глушитель сделать для станка )
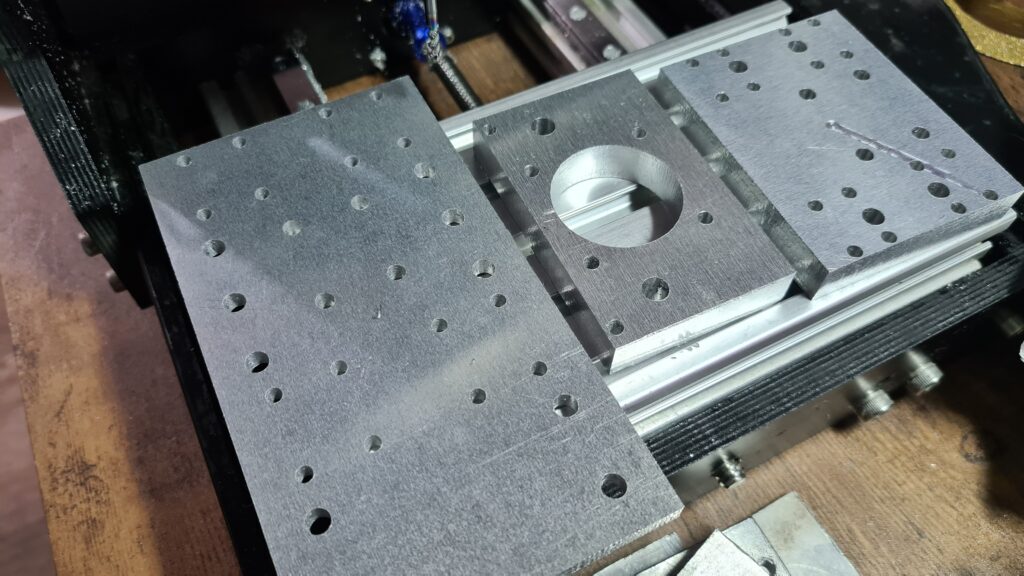
Начал изготавливать ось по прошлому проекту и нашёл несколько косяков. Проблема с креплением зажима шпинделя и большая ширина оси, что уменьшает и без того маленькое рабочее поле. Переделал компактнее. Как придёт алюминий буду фрезеровать компоненты )
В интернете очень много разных “формул” для расчёта напряжения на подстроечном резисторе, задающем ограничение тока RMS, и все они разные. Лучше почитать даташит…
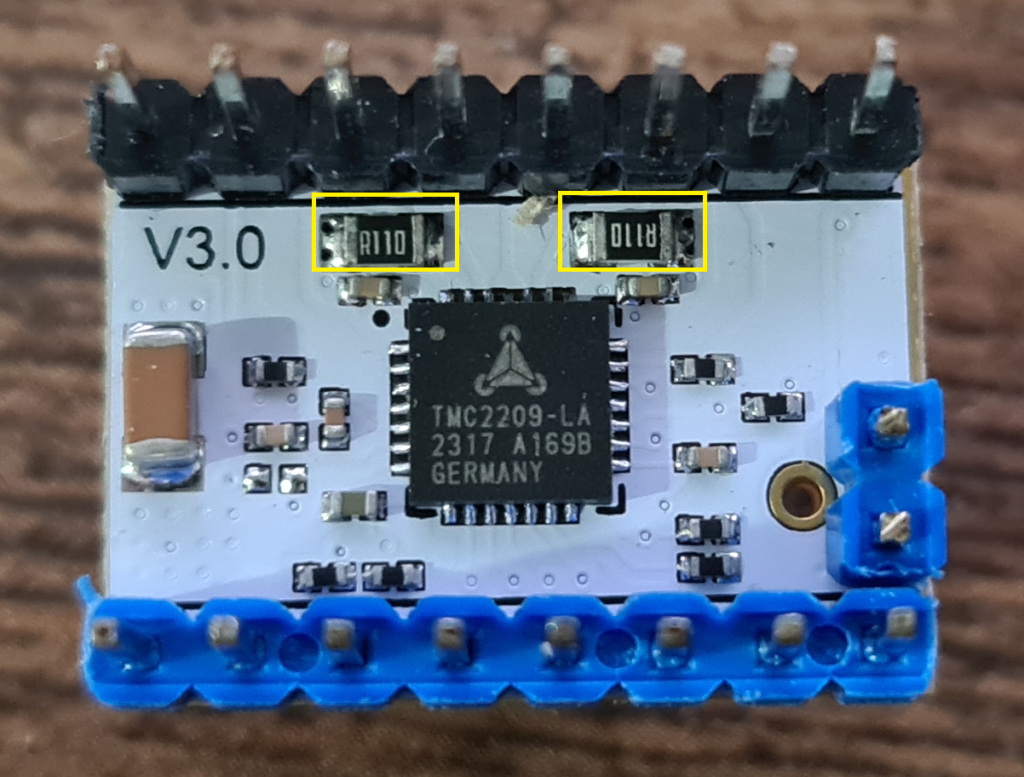
Важно уточнить, что на данный момент я не использую UART протокол в драйверах и все значения регистров внутри драйверов после включения остаются по умолчанию. И вот по умолчанию там сконфигурировано использование Vref для масштабирования ограничения по току и использование внешних Rsense регистров для задания максимально “доступного” тока. Эти резисторы ставятся на BRA(23), BRB(27) пины и их легко найти на плате:
Это фото моего драйвера и на нём жёлтыми рамками выделены Rsa, Rsb резисторы (те самые Rsense). На них написано R110 что равно 110мΩ (0.11Ω). Без этого значения просто не возможно ни чего посчитать. И эти резисторы могут быть какими угодно у разных производителей плат драйверов и каким образом кто-то что-то в интернете может рекомендовать не призывая узнать номинал резисторов – мне не понятно.
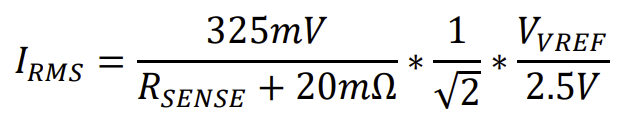
Итак, миссия 1 выполнена и значение Rsense узнали. Теперь нужно найти формулу расчёта ограничения RMS тока в даташите:
Осталось только разобраться немного с Vvref. В даташите сказано, что значение (Vvref / 2.5) используется как множитель к ограничению тока, заданному Rsense резисторами. То есть если, например, Vvref == 2.5, то множитель будет == 1.0, а если, например Vvref == 1.0, то множитель будет равен 1.0/2.5 == 0.4. Значение напряжения Vvref выше 2.5 трактуется как 2.5, то есть множитель всегда будет равен 1.0 при Vvref >= 2.5.
Как ранее стало известно, у меня стоят Rsense резисторы на 110мОм, подставим это значение в формулу и упростим её:
Тут номиналы резисторов Rsense так удобно подобраны, что умножение и деление на 2.5 можно сократить и получим:
I_rms = 0.7071 * V_vref
V_vref = I_rms / 0.7071
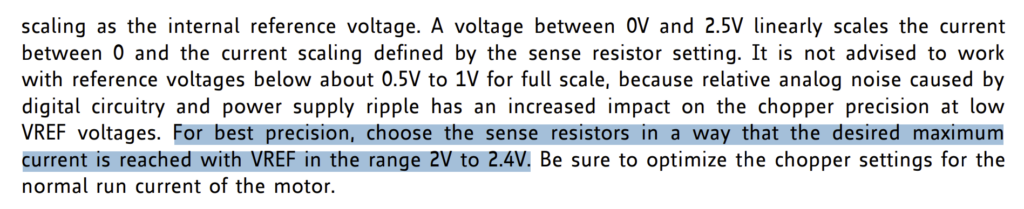
И да, на некоторых сайтах такой множитель рекомендуют, но без знания номинала Rsense нельзя быть уверенным, что всё посчитано правильно. И ещё на некоторых сайтах написано, что “Значение (Vref) не должно превышать 1.2 В или драйвер может выйти из строя“. Вот откуда это взялось??? В даташите не только сказано, что диапазон настройки Vvref до 2.5V (а вообще до 5V, но оно “обрежется” до 2.5V при расчёте множителя), так ещё и дополнительно сказано следующее:
то есть ниже 0.5V вообще не надо опускаться, да и лучше больше 1.0V ставить значение, в диапазоне 2-2.4V (но для этого надо правильно подобрать Rsense конечно). И сжечь мой драйвер, выставив Vvref в 2.5V, ни как не получится, ведь если посчитать по формуле максимальный ток: I_rms = 0.707 * 2.5 получим ток 1.767A, что ниже заявленного продолжительного RMS тока:
И ещё один момент: не стоит использовать результат расчёта по формуле “как есть”. Это “идеальное” значение, но номиналы Rsense резисторов могут оказаться не очень точными да и мотор может не держать заявленный ток и потому лучше выставить значение на 10-20% меньше, чем посчитанное по формуле, для безопасности.
Понадобилась для квартирного станкостроения возможность управлять шаговыми движками. По советам из гугла купил дешёвые компоненты, собрал, не заработало…
Опуская все промежуточные проблемы от которых знатно подгорело просто запишу сюда что сделал в итоге, чтоб работало как должно.
Глава 1: Питание
CNC SHIELD сделан под Arduino, у которой 5V логика. Wemos же сделан на основе ESP32 и тут логика 3.3V, потому решил запитать CNC SHIELD от 3.3V. Для этого надо:
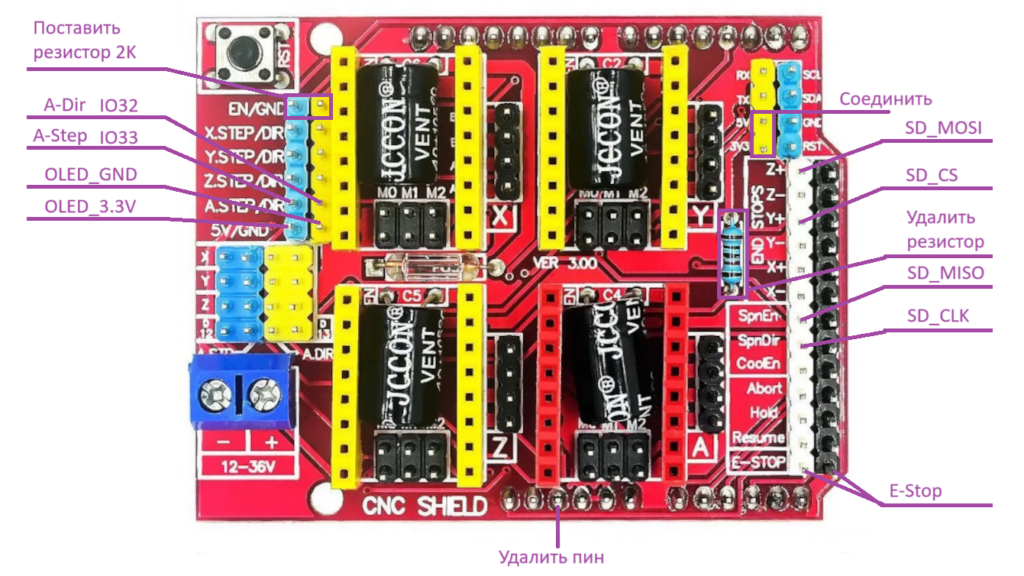
Удалить ножку 5V на шилде, чтоб на шилд с платы Wemos не поступали 5V в принципе. Я просто откусил кусачками ножку в PLS гребёнке.
В верхнем правом углу на шилде есть 2 пина, стоящие рядом: 3.3V и 5V – их надо соединить между собой перемычкой. Так с шины 3.3V будет подано питание на шину 5V что и нужно.
Глава 2: Распиновка
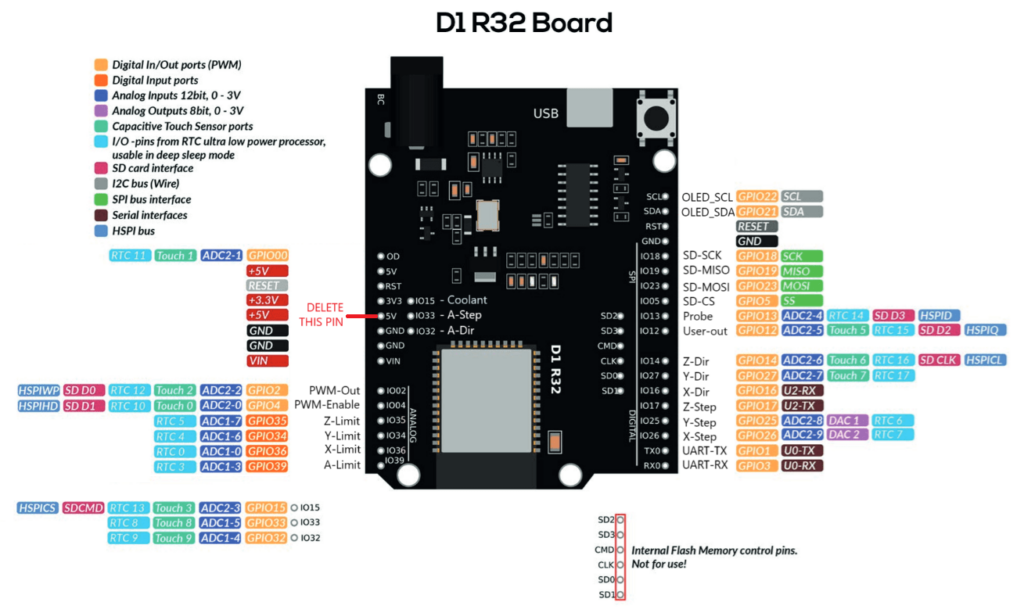
Если понадобится использовать SD карту (да, понадобится), то не получится сохранить соответствие функций пинов на шилде с их шелгографией. SD карта ну ни как не захотела заводиться на других пинах, кроме IO5, IO18, IO19, IO23 на ванильной прошивке FluidNC и потому необходимо некоторые функции переместить на другие пины.
А ещё на самой плате Wemos не правильные подписи некоторых пинов, как и на изображениях самой платы в интернете. Это жесть. Я всё прозвонил, исправил обозначения на картинке из интернета и подписал функции всех задействованных в проекте пинов:
Глава 3: ESP32 не загружается
На картинках выше я пометил что нужно сделать, а тут напишу зачем это надо делать.
ESP32 не будет загружаться со вставленной платой CNC SHIELD. Виновником оказался IO12 пин. На CNC SHIELD плате это EN пин. Он идёт к драйверам моторов на плате на соответствующие EN ножки. IO12 не обычный пин, это т.н. bootstrap pin и его функция при старте ESP32 это выбор напряжения питания внешней микросхемы FLASH памяти с которой грузится микроконтроллер. По умолчанию при старте ESP32 этот пин подтянут к GND и будет выбрано питание 3.3V, однако на плате CNC SHIELD этот пин подтянут резистором к VDD (+питания) из за чего при старте контроллера выбирается не правильное (1.8V) питание FLASH.
Я удалил этот резистор (указано на картинке выше), тем более он всё равно бесполезен, т.к. на каждом драйвере этот пин всё равно подтянут к питанию 4.7К резисторами. И после его удаления ESP32 стартует успешно, но это только если в shield не вставлены драйверы моторов.
Устанавливаем драйверы моторов в соответсвующие разъёмы и.. снова ESP32 не загружается. Но тут всё легко, т.к. проблема всё та же – IO12 пин. На каждом драйвере установлен свой резистор для подтяжки к питанию пина EN, потому после установки драйверов EN (IO12) снова подтянут к питанию и снова та же проблема с загрузкой. Я решил эту проблему простым костылём, сделав “джампер” с резистором на 2К между EN и GND пинами на CNC SHIELD (указано на картинке 2).
Глава 4: Конфигурация
После установки последней прошивки FluidNC я залил в неё файл конфига через WEB интерфейс и применил его. Моторы крутятся, OLED дисплей работает:
Мне лично удобно некоторые задачи выполнять через Candle и потому решил разобраться с тем, как его подключить к FluidNC. На данный момент подключаюсь к нему через виртуальный COM порт, работающий поверх IP сети. Использую программу Tibbo. Настройка там тривиальная – достаточно создать в Tibbo VSP Manager новый COM порт и указать IP адрес FluidNC платы и порт 23, после чего можно использовать этот порт в Candle.
Есть у меня китайский недостанок с рабочей областью 16×10 см. Изначально он не мог, конечно, ничего, но тем веселее его превращать в адекватный.
В прошлом я уже делал ему апгрейды:
Заменил шпиндель с 60W на 250W
Поставил нормальный драйвер для шпинделя
Прикрутил к станку блок питания на 300W и запитал с него всё, чтобы одним проводом в розетку подключать
Пересобрал ось Y на рельсы
Заменил ER11 гайку на хорошую и купил точные цанги
Это дало многое. Точность и жёсткость станка сильно увеличились и я даже смог пофрезеровать алюминий, биения на фрезе уменьшились с двух десятых до двух сотых и потому теперь концевая фреза 0.2мм больше не ломается ) Но, всё же, фрезеровка алюминия не до конца идеальная и потому я решил переделать и остальные оси )
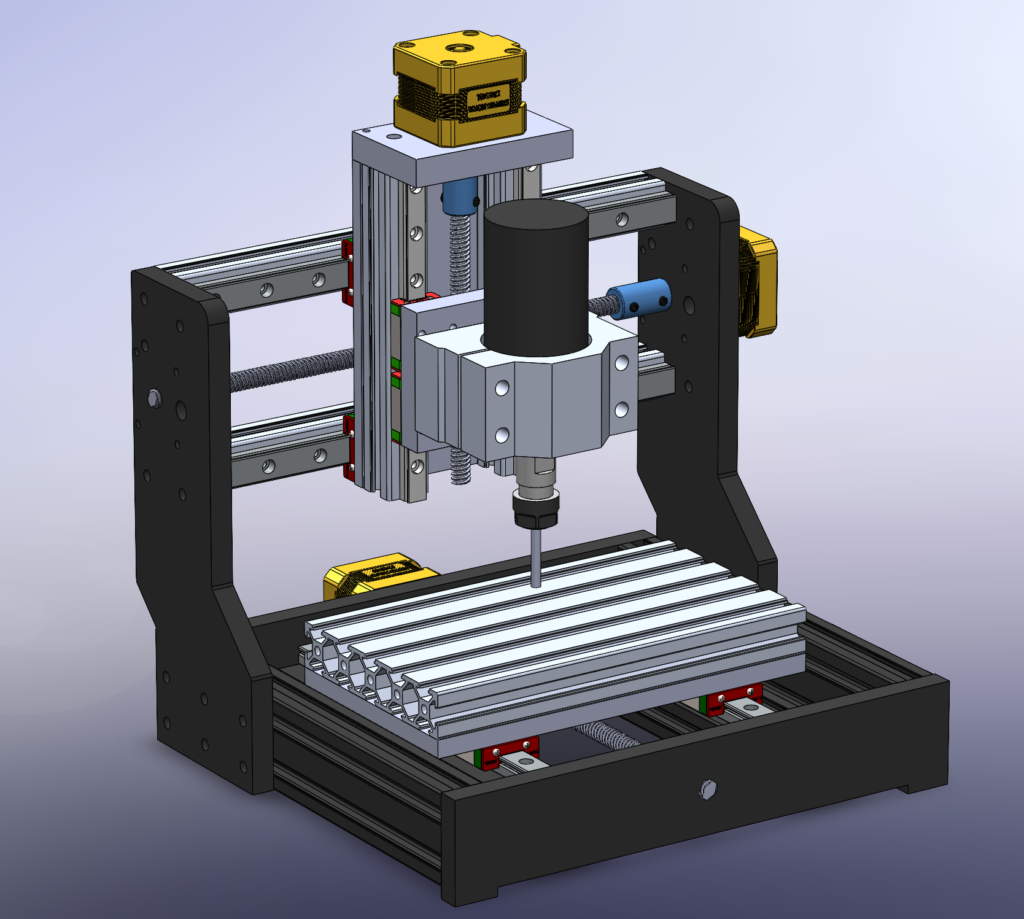
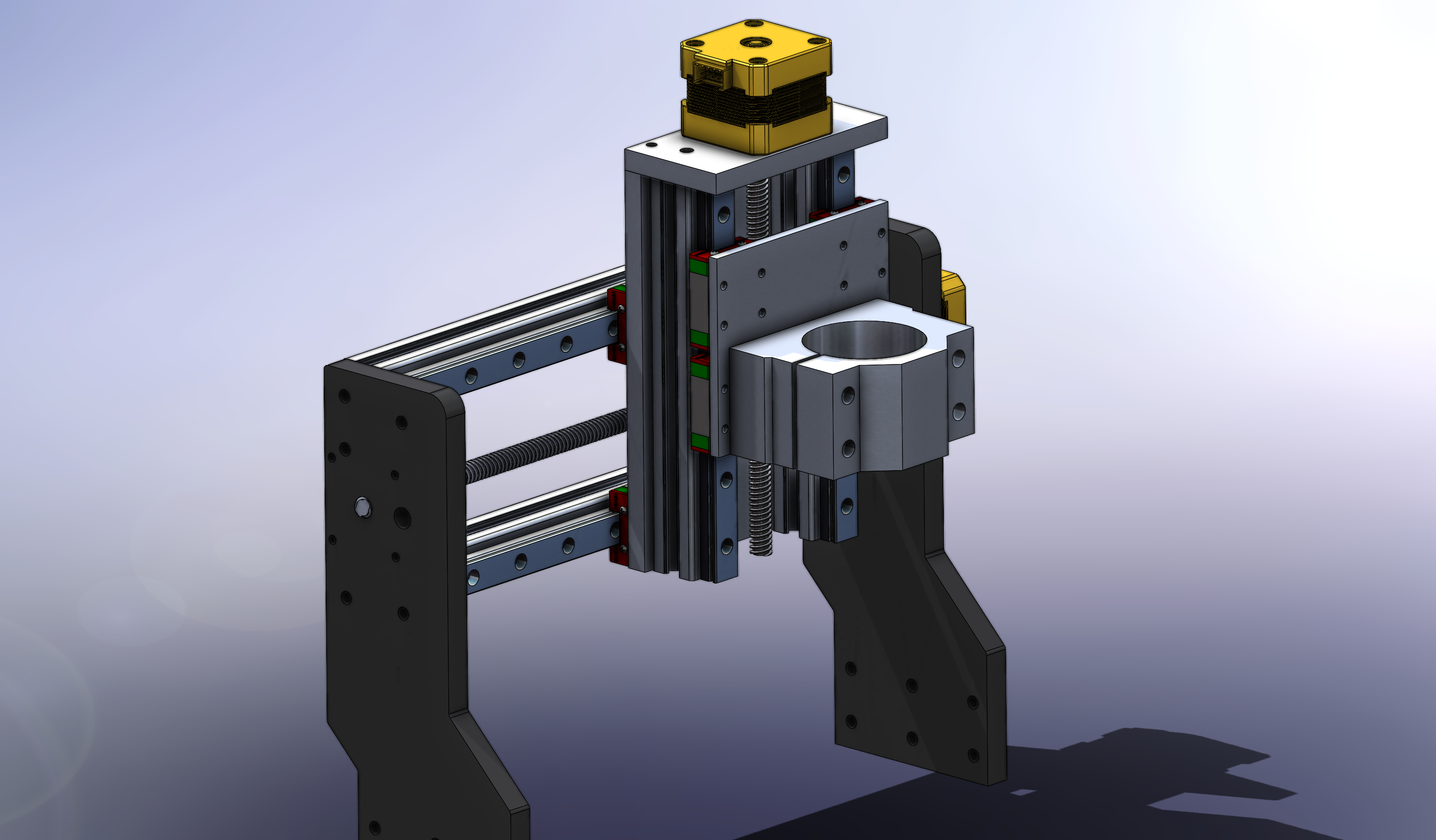
Начать переделку решил с изучения CAD софта. Не сильно это просто когда болеешь, но спустя день вот что удалось сделать с нуля:
Пока решил оставить стандартные стойки оси Y и посадить рельсы на штатные профили. В идеале было бы хорошо и эти стойки переделать, но для этого нужен ЧПУ по-больше (и алюминия по-больше) и пока не хочется с этим возиться.
Ось Z делал максимально компактной, так как её расширение съедает ширину рабочей области. И теперь станок у меня будет не 16×10 а 15×11.5 чего в принципе достаточно для моих развлекух.
Осталось это всё сделать…
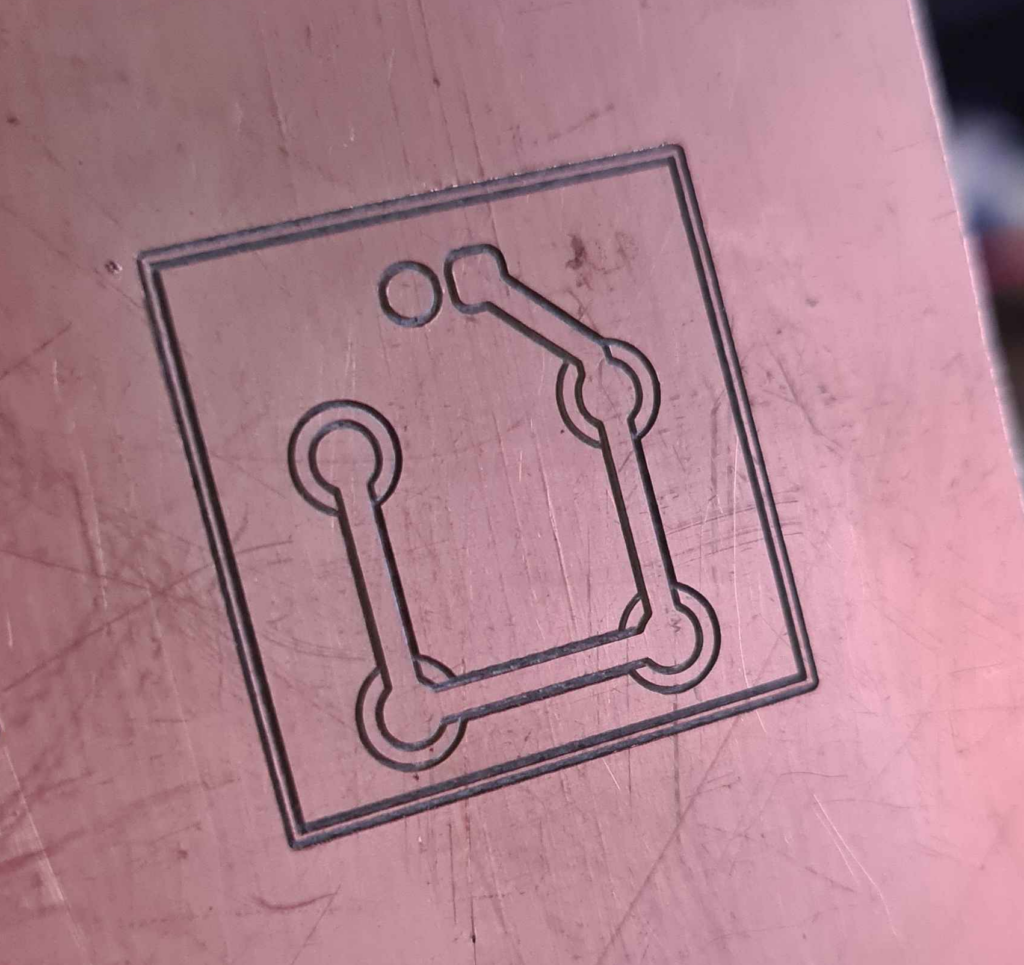
А так выглядит тестовая фрезеровка дорожек платы концевой фрезой 0.2мм:
Ещё с детских лет я хотел заниматься электроникой, быть не только её пользователем, но и создателем. Но как-то так сложилось, что я лишь пишу для неё программы.
Программирование – это здорово, но невозможность облечить программу в физическое представление ограничивает, скажем так, мою свободу самовыражения, так как не на все мои идеи кто-то сделал готовую плату ) В общем, решил я расширить своё сознание и постигнуть науку создания печатных плат, а так же подтянуть знания по схемотехнике.
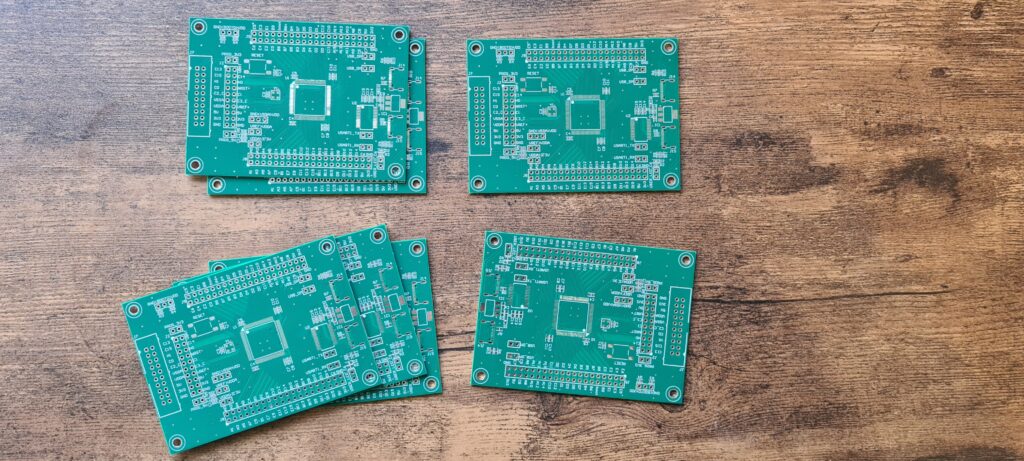
Начать решил с очень простой платы, так как ни чего в этом не понимал (да и сейчас мало что понимаю). Для прототипирования у меня есть много готовых девбордов с разными микроконтроллерами и ПЛИС, но все они в контексте моих задач обладают недостатками, делающими пртотипирование не очень удобным процессом. Потому я решил для начала спроектировать очень простой девборд, но лишённый основных недостатков, которые лично мне мешают.
Засел я за изучение САПР системы, схемотехники, электроных компонентов, основ трассировки плат, поспрашивал вводные у коллеги (за что ему большое спасибо) и спустя 4 вечера обучения, создания схемы и трассировки плата была заказана на заводе Резонит. Да, она тривиальная, все могут такое создать и я уже знаю как её надо переделать в следующей версии, но всё же, пройти все этапы и в итоге держать настоящую плату спроектированную своими рукаим – это отличное ощущение )
Осталось дождаться посылок с электронными компонентами )
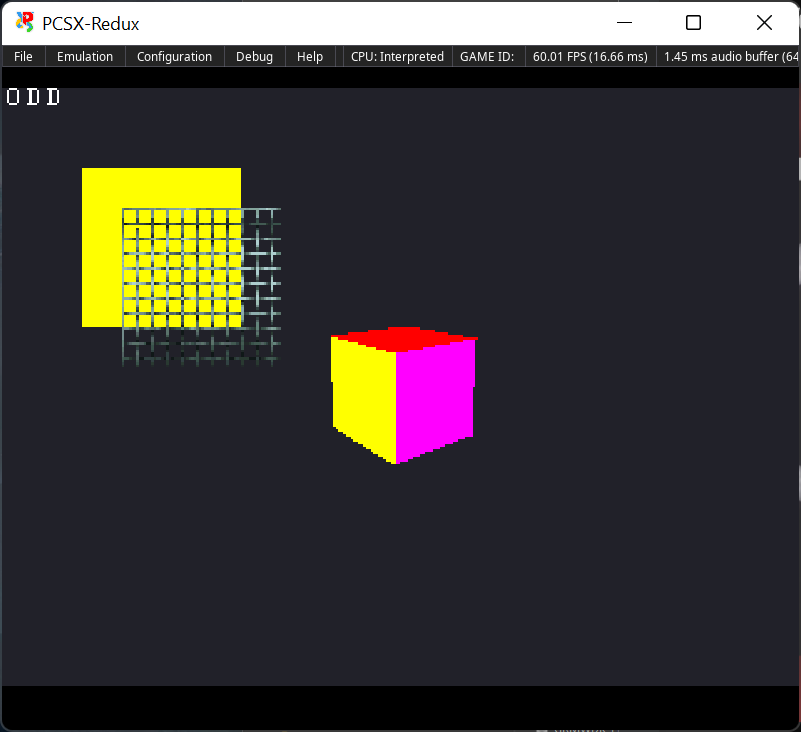
Иногда хочется просто так пописать код под что-то экзотичное, ограниченное в ресурсах для расширения сознания. А в случае с PlayStation1 можно программировать и 3D графику, что вдвойне более весело.
Официальный PS1 SDK Psy-Q не удаётся удобно использовать, т.к. многие из утилит в тулчейне собраны под DOS, который был удалён из Windows 10+. Писать код в виртуальной машине не очень здорово, поэтому собрал себе GCC тулчейн для удобного программирования.
Собрал тулчейн на основе newlib со стандартной библиотекой C++. Изначально я так же собирал с поддержкой компилятора С++, но без стандартной библиотеки, что не очень удобно, т.к. многие стандартные файлы здорово иметь под рукой. Например, <new>, для использования placement new, или <type_traits>, <array> и т.п.
Так случается в жизни, что небходимо собрать С++ код, написанный по самым свежим стандартам, под систему, в которой (или для которой) доступны только компиляторы устаревшей версии.
В моём случае появилась необходимость получить cross компилятор GCC 11+ версии, собранный с glibc версии именно 2.27. И он обязательно должен знать о Debian multiarch для правильной сборки приложений под Ubuntu, RaspberryPi OS и т.п.
Конфиги в мануале собирают тулчейн с такими компонентами: gcc: 11.2.0 [C/C++] Linux kernel: 4.9.301 glibc: 2.27 gdb: 11.2
wget http://crosstool-ng.org/download/crosstool-ng/crosstool-ng-1.25.0.tar.bz2
tar -xf crosstool-ng-1.25.0.tar.bz2
rm crosstool-ng-1.25.0.tar.bz2
cd crosstool-ng-1.25.0
./configure --enable-local
make
Получение патча поддержки debian multiarch для binutils
Мои конфиги установят собранные тулчейны в директорию /crossbuild/toolchain Её необходимо предварительно создать и изменить владельца/разрешения так, чтоб пользователь, от имени которого будет запущен билд, имел доступ на запись и чтение в этой директории. Иначе можно поменять эту директорию в конфиге самостоятельно.
Проблемы во время сборки
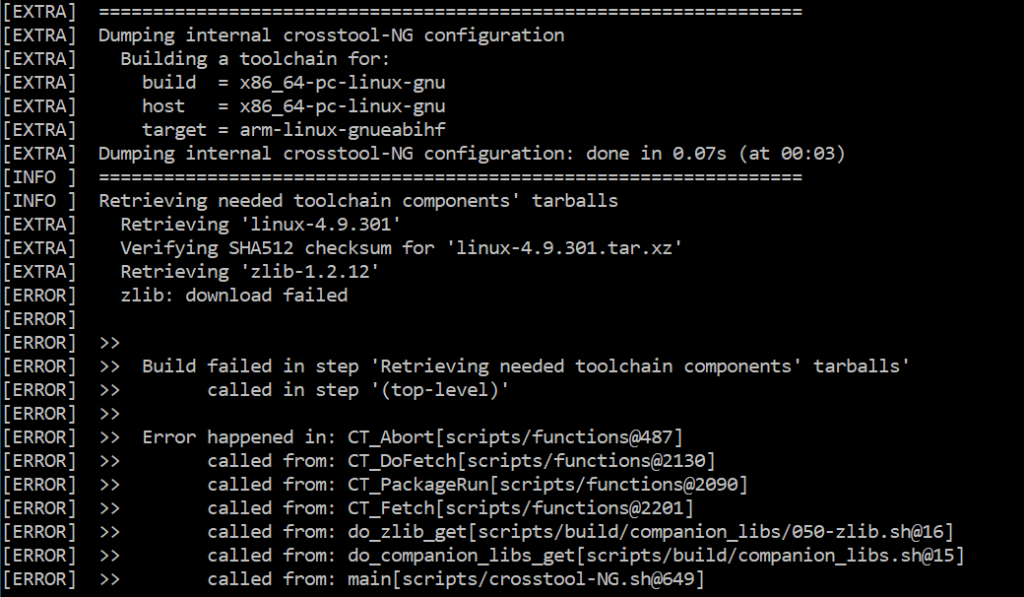
После чего можно приступать уже к сборке тулчейнов, однако, она скорее всего не будет успешной конкретно с используемой мной версией crosstool-ng, т.к. он не сможет скачать исходники zlib. Выглядит это примерно так:
Исходники crosstool-ng я не хочу править, поэтому просто скачал требующуюся версию zlib сам и положил в папку кеша. Как видно из скриншота, crosstool-ng хочет zlib-1.2.12, качаем:
# В директории crosstool-ng-1.25.0
wget https://zlib.net/fossils/zlib-1.2.12.tar.gz -P .build/tarballs
cd /crossbuild/toolchain
tar -czf gcc11.2.0-aarch64-linux-gnu-kernel4.9.301-glibc2.27-gdb11.2.tar.gz ./gcc11.2.0-aarch64-linux-gnu-kernel4.9.301-glibc2.27-gdb11.2
tar -czf gcc11.2.0-arm-linux-gnueabihf-kernel4.9.301-glibc2.27-gdb11.2.tar.gz ./gcc11.2.0-arm-linux-gnueabihf-kernel4.9.301-glibc2.27-gdb11.2
Позже я расширю описание. Сейчас сохранил мануал для себя, чтоб не потерять результаты трудов )
Написал за несколько вечеров код работы (чтение/конфигурация) с игровыми контроллерами Sega, PlayStation1, PlayStation2 под микроконтроллер STM32F7, высунул данные через USB (HID устройство), можно пользоваться как обычным компьютерным геймпадом.
Я использовал борд с микроконтроллером серии STM32F7 с сайта одного знакомого “электронщика”: https://evaluationboard.ru . В борде нет ни чего лишнего и имеется всё необходимое. Например, в нём распаян полностью рабочий программатор ST-Link V2 и установлена микросхема FTDI (USB to COM адаптер), оба они припаяны к хабу, от которого идёт наружу “принтерный” USB разъем. Получаем отладку SWD, UART через 1 кабель и ни каких лишних девайсов/проводов. Остальные плюшки борда можно рассмотреть на сайте, при желании.
Но этого оказалось недостаточно…
Когда всё заработало, я подумал: а что если реализовать мечту “детства” и написать немного кода для некогда часто мной используемого эмулятора PlayStation2 “PCSX2”?
Сделал fork pcsx2 проекта на github, разобравшись (со скрипом, т.к. API очень не интуитивно сделан и не документирован) в API эмулятора, накидал быстро код общения с моим хардварным интерфейсом к геймпадам и назвал проект “RealPad” по аналогии с другими плагинам. “Real” – тут важная часть названия, т.к. подключается настоящий геймпад и по-настоящему читается виртуальной PS2 без дополнительных алгоритмов обработки ввода.
Это самая простая и самая нативная интеграция геймпада, что может быть ) Любая игра может как угодно пользоваться геймпадом – это и чтение данных ввода (любых, включая силу нажатия кнопок) и конфигурация геймпада и т.п.
Disclaimer: код пока что сырой, написан в скоростном режиме как proof of concept. Предстоит его почистить, реализовать правильную выгрузку, поддержку нескольких геймпадов, починить косяк, когда игры не видят контроллер после загрузки быстрого сохранения (F3). А ещё ввод с клавиатуры не работает, когда используется мой плагин, например, не могу использовать “быстрое сохранение” (F1), придётся разобраться что ещё от меня хочет эмулятор.
В дальнейшем выложу и прошивку под STM32, как только её в порядок приведу )
Stm32CubeMX требует наличие установленного OracleJRE/JDK и при его отсутствии в системе ругается, что не может найти JRE версии 1.8.0_45 или выше. Кубу всё равно на то, что у меня в системе есть OpenJDK (ставил разные версии, добавлял в PATH, не помогало) и мне на пару секунд даже показалось, что придётся сдаться и поставить ещё и OracleJRE (чего я очень не хотел), но на самом деле сдаваться рано )
Сначала попробовал изменить требуюмую версию Java в инсталлере куба, но понял, что это не помогает. Потом нашёл и “поставил” именно 1.8.0_45 но OpenJRE а не OracleJRE – всё равно не помогло. Потом нашёл некий интересный путь C:ProgramDataOracleJavajavapath ! В нём лежат 3 симлинка на java.exe, javaw.exe, jawaws.exe.
Тут я решил, что “вот оно”, мне надо эти симлинки создать на соответствующие exe файлы из моей версии OpenJRE. И создал. И не помогло ) Куб при установке ругался всё тем же сообщением.
Теперь я решил запустить java.exe через мой симлинк и о чудо, java ругнулась, что в реестре не хватает ветки. Я поставил OracleJDK, экспортнул ветку, удалил OracleJDK, импортнул ветку и подправил пути на свои, вычистив лишние ветки/ключи.
И всё заработало !
Моя версия OpenJDK лежит по такому пути: C:openjdk-12.0.2
А вот текст .reg файла, которым можно указанный выше путь зарегистрировать в реестре:
Windows Registry Editor Version 5.00 [HKEY_LOCAL_MACHINESOFTWAREJavaSoftJava Runtime Environment12.0.2] “JavaHome”=”C:\openjdk-12.0.2” “RuntimeLib”=”C:\openjdk-12.0.2\bin\server\jvm.dll” “MicroVersion”=”0” “BuildNumber”=”10”
Насчёт необходимости ключей“MicroVersion”=”0”, “BuildNumber”=”10” я не разбирался. Может они не нужны (так выглядит), но OracleJRE их создаёт. Хз, решил, что лучше оставить. Кто знает что в будущем может поломаться из за их отсутствия. ОБНОВЛЕНИЕ: STM32CubeProgrammer не захотел работать с хаком, описаным выше. Как оказалось, CubeProgrammer использует JavaFX, которого нет в официальной сборке OpenJDK. Почему-то за преемлимое время мне не удалось установить OpenJFX поверх OpenJDK, потому я пошёл другим путём и скачал OpenJDK сразу собранный вместе с OpenJFX.
Архив с этим билдом JDK я распаковал в корень диска C
А вот контент .reg файла, регистрирующего установку этой версии JDK:
Windows Registry Editor Version 5.00 [HKEY_LOCAL_MACHINESOFTWAREJavaSoftJDK] “CurrentVersion”=”13.0.0” [HKEY_LOCAL_MACHINESOFTWAREJavaSoftJDK10.0.2] “JavaHome”=”C:\bellsoft-jdk13-windows-amd64\jdk-13”
Здесь можно заметить, что ветка реестра содержит версию 10.0.2, а не 13.0.0. Это важно, т.к. по этому имени STM32CubeProgrammer проверяет версию java, которая должна быть 1.8.0 – 10.99.99. Приходится таким путём обманывать STM32CubeProgrammer, если хочется иметь в системе свежую версию JDK.