Коптер
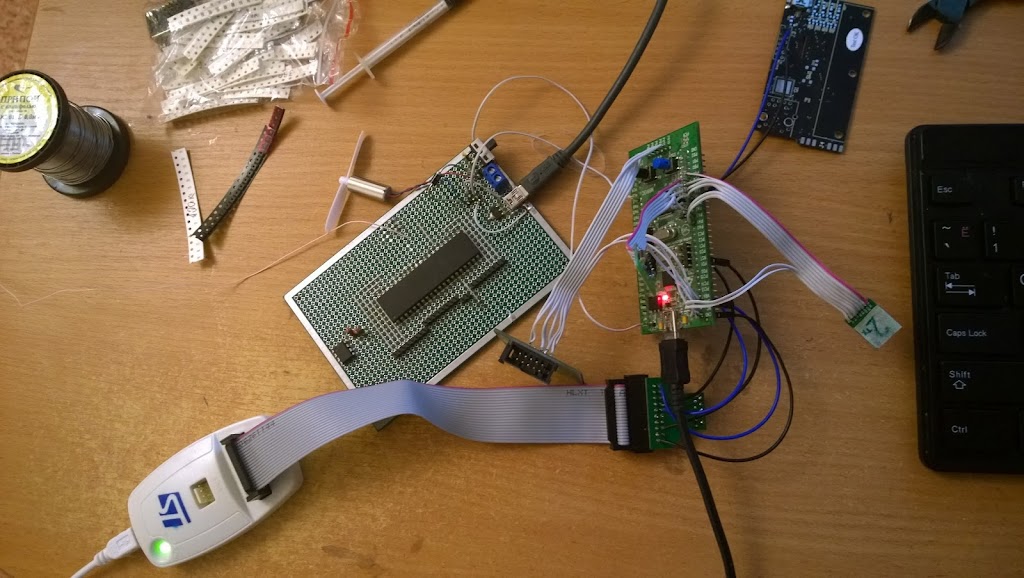
Начал совсем недавно пилить свой квадрокоптер. За основу пока взят мой борд STM32VLDISCOVERY. У него на борту не очень крутой контроллер STM32F100RBT6: 24MHz, 128Kb FLASH, 8Kb RAM, однако пока что его даже много )

Что успел запилить:
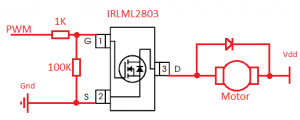
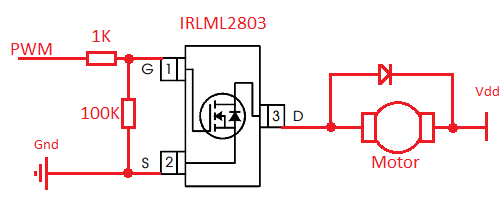
Напаял железки на борд! 2 RFM70 радио модуля пока на 1 общий SPI, акселерометр BMA280 на отдельный SPI, собрал узел контроля оборотов коллекторного мотора, схемка вышла не сложная ) Через полевой транзистор IRLML2803 ШИМ-ом включаю/отключаю питание у мотора, скважностью пульса регулируются обороты, так же добавлен диод Шоттки в качестве шунта мотора, резистор на 100К что бы не происходило произвольного открывания затвора транзистора если WPM пин в подвешенном состоянии.
И для удобства запилил простенький командный интерфейс через виртуальный COM порт, могу теперь устанавливать “обороты” движка через консоль.
Так же завёл акселерометр, что, в общем то, не сложно, используя стандартную библиотеку от BOSCH https://github.com/BoschSensortec/BMA2x2_driver. Хотя конечно некоторые вещи в нём не очевидны! Например, у него в bma2x2.c файле в глобальной переменной u8 V_BMA2x2RESOLUTION_U8 = BMA2x2_14_RESOLUTION; захардкодена битность показаний осей акселерометра, всегда 14 бит. И это странно тем, что мне нужно менять чужой драйвер что бы получить другую битность.
А ещё одна корявость состоит в том, что у них же в файле-примере bma2x2_support.c есть семплы имплементации функций чтения/записи SPI и чтение осей акселерометра. Акселерометр позволяет последовательно читать несколько регистров за раз! И для этого в семпле используются буферы и их размер задефайнен как #define SPI_BUFFER_LEN 5 чего не хватает для работы с функцией bma2x2_read_accel_xyz которая в этом же семпле и используется. Я изначально внимание не обратил и долго думал, почему у лежащего горизонтально акселерометра ускорение 0 ) Оказалось ось Z просто не вмещалась в буфер!
Радио пока через RFM70. Для реального применения в квадрокоптере этот радио модуль не подходит из за малого радиуса действия (метров 10), но хоть что-то. Будет использоваться для передачи команд с пульта на коптер.