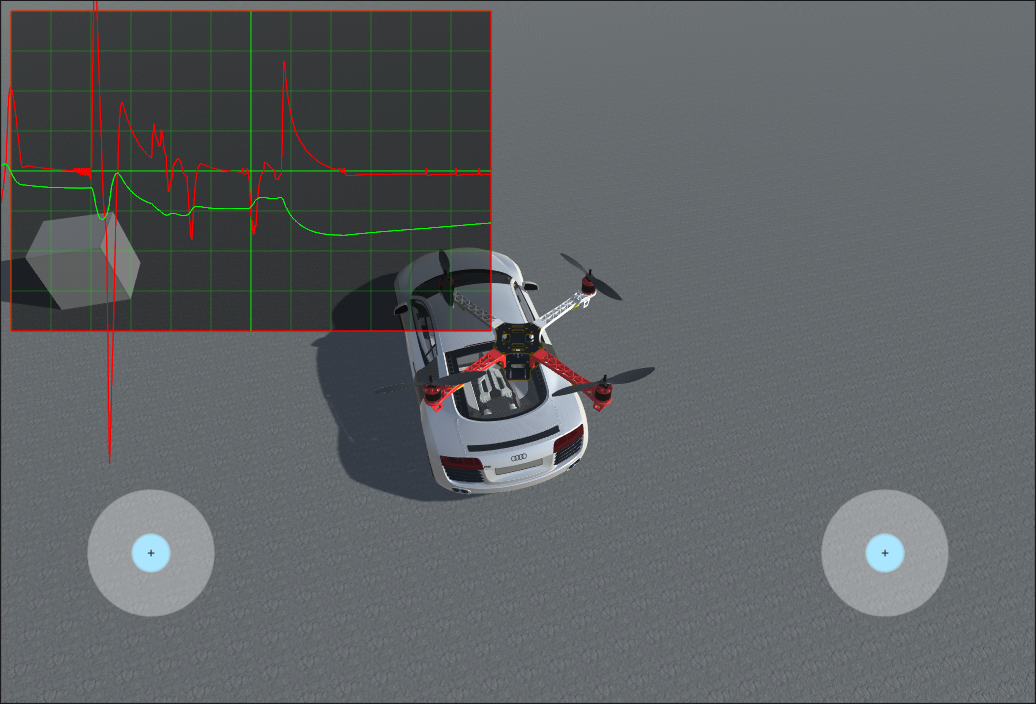
Подкрутил стабилизацию, теперь осталось добавить контроль Yaw вращения и в первой итерации контроллер полёта готов. Умеет сам держать заданную высоту, умеет слушаться команд “пульта” ( в реале – джойстика) и собсно держать нужную заданную ориентацию. Всё считается по-честному.
Leave a Reply